Δύο ρομποτικά τετράποδα με την υπογραφή του Ιδρύματος Τεχνολογίας και Έρευνας του Εργαστηρίου Υπολογιστικής Όρασης και Ρομποτικής της Κρήτης έχουν κερδίσει τις εντυπώσεις στην 86Η ΔΕΘ.
O λόγος για τον Spike και την Ε-Cattie, τον ρομποτικό «σκύλο» και τη ρομποτική «γάτα» που φιλοδοξούν να γίνουν ο πιο έξυπνος φίλος του ανθρώπου αφού με τον έναν ή τον άλλο τρόπο μπορούν και θέλουν να φροντίσουν για την εξυπηρέτηση και την ασφάλειά του.
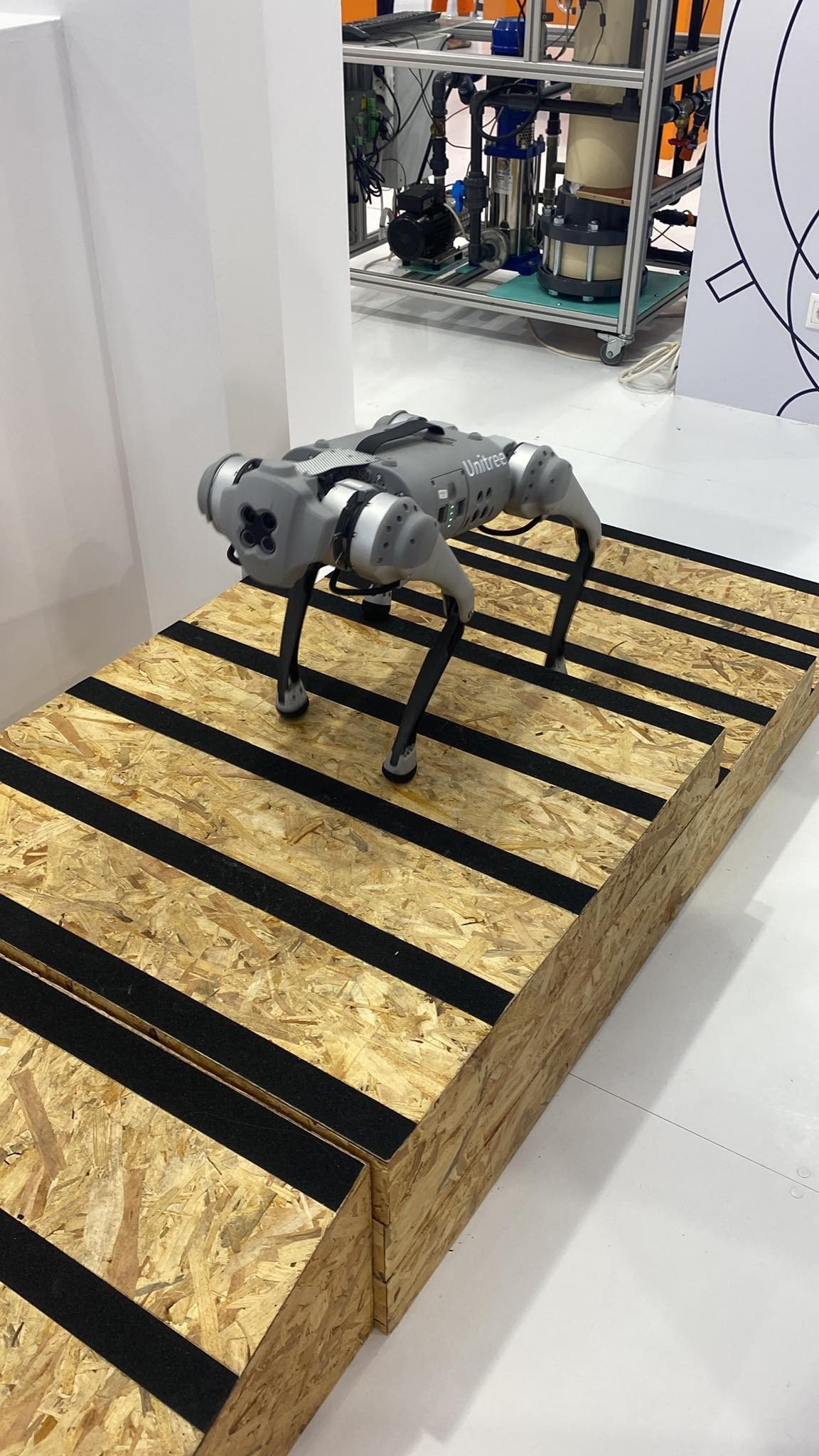
Ειδικότερα, ο Spike μπορεί να χρησιμοποιηθεί για έρευνα και συνδιάσωση, επίβλεψη κτιρίων, παρακολούθηση, εντοπισμό ανθρώπων κλπ. καθώς έχει ενσωματωμένη κάμερα και οι πληροφορίες που συλλέγει μπορούν να επεξεργασθούν. Ένα χαρακτηριστικό παράδειγμα αναγκαιότητάς του είναι η ακίνδυνη μεταφορά αντικειμένων και αγαθών σε περιπτώσεις έκτακτης ανάγκης.
«Σε περίπτωση σεισμού θα μπορούσαμε να χρησιμοποιήσουμε τον Spike ώστε να μην κινδυνέψουμε εμείς αν χρειαστεί να μεταφέρουμε κάτι. Έχει τη δυνατότητα να κουβαλά και βαριά αντικείμενα. Θα μπορούσε να εντοπίσει και εγκλωβισμένους ανθρώπους αρκεί να είναι σε ευδιάκριτο σημείο καθώς τώρα μελετάμε την κίνησή του σε περίεργα εδάφη, όπως πχ. σε σκαλιά και απότομες κλίσεις. Στόχος μας είναι βελτιστοποίησή του ώστε να αποκτήσει αυτόνομη πλοήγηση σε οποιοδήποτε έδαφος, εσωτερικό και εξωτερικό χώρο, ακόμα και σε δυσπρόσιτα εδάφη. Αυτή τη στιγμή αναπτύσσουμε το κατάλληλο λογισμικό ώστε να το εξελίξουμε με νέες εφαρμογές», εξηγεί στο makthes.gr η Δέσποινα Κατερίνα Αργυροπούλου, Ηλεκτρολόγος Μηχ. & Μηχ. Υπολογιστών, Βοηθός Έρευνας του Εργαστηρίου.
Τον Spike, όπως και πολλά ρομποτικά συστήματα, ο χειριστής μπορεί να τον ελέγξει μέσω υπολογιστή και να λαμβάνει τα δεδομένα που συλλέγει από κάμερες, αισθητήρες ή οποιοδήποτε άλλο σύστημα υπάρχει πάνω στο ρομπότ. Σύμφωνα με την κ. Αργυροπούλου μπορούν να κατασκευαστούν μέσω κώδικα σενάρια για το πως το ρομπότ θα κινηθεί στο χώρο με στόχο φυσικά την πλήρη αυτονομία του:
«Σε αυτά τα σενάρια συμπεριλαμβάνουμε την ταχύτητα και την κατεύθυνση που θα κινηθεί ενώ μπορούμε να αναπτύξουμε λογισμικά που θα δώσουν μία φοβερή αυτονομία στο ρομπότ να κινηθεί σε άγνωστους χώρους, να τους χαρτογραφήσει, να εντοπίσει τη θέση του μέσα σε αυτούς και να αναγνωρίσει τις επιφάνειες που έχει μπροστά του ώστε να αλλάξει και τον τρόπο βαδίσματός του για να περπατήσει πάνω σε αυτές.»
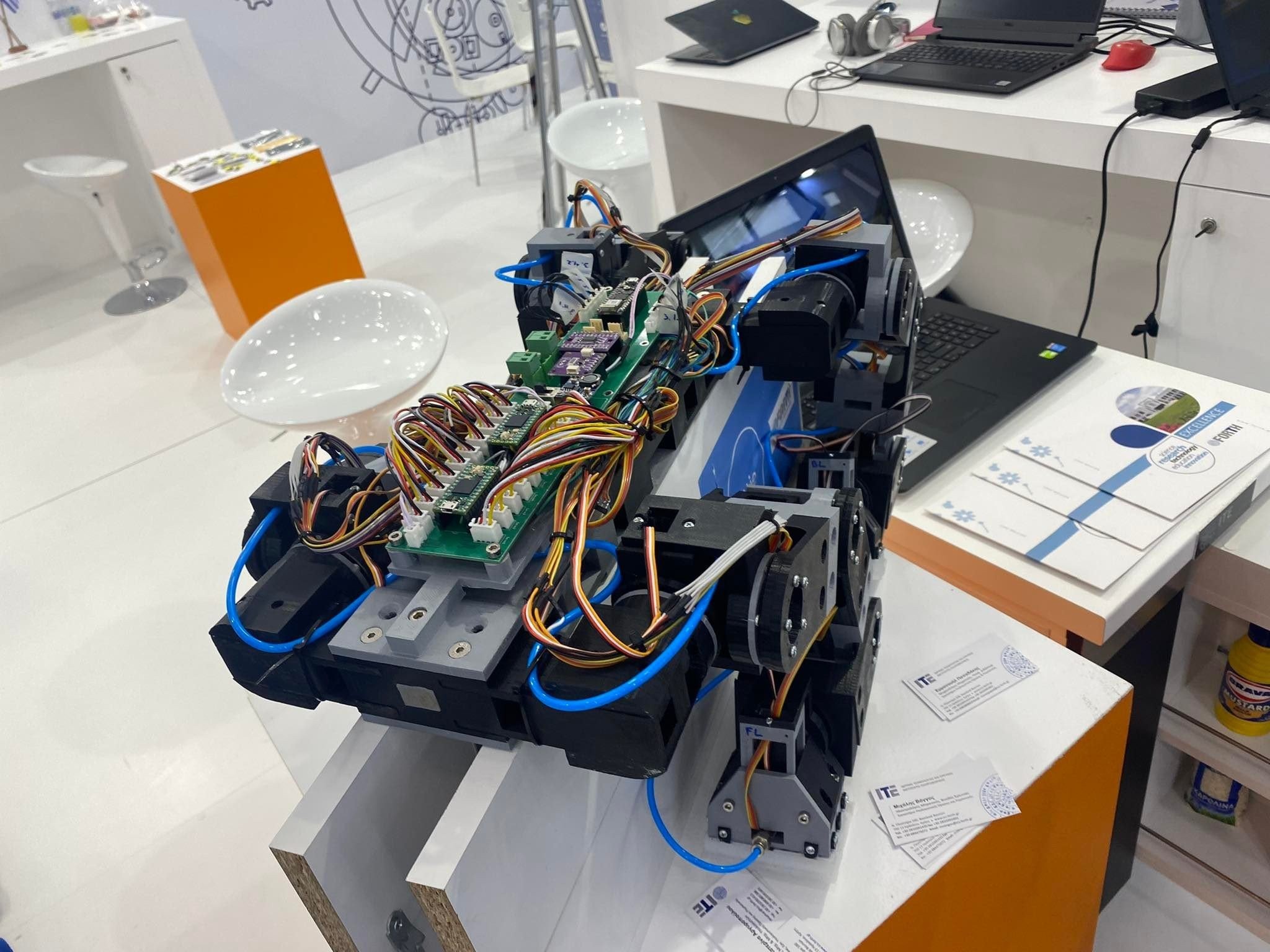
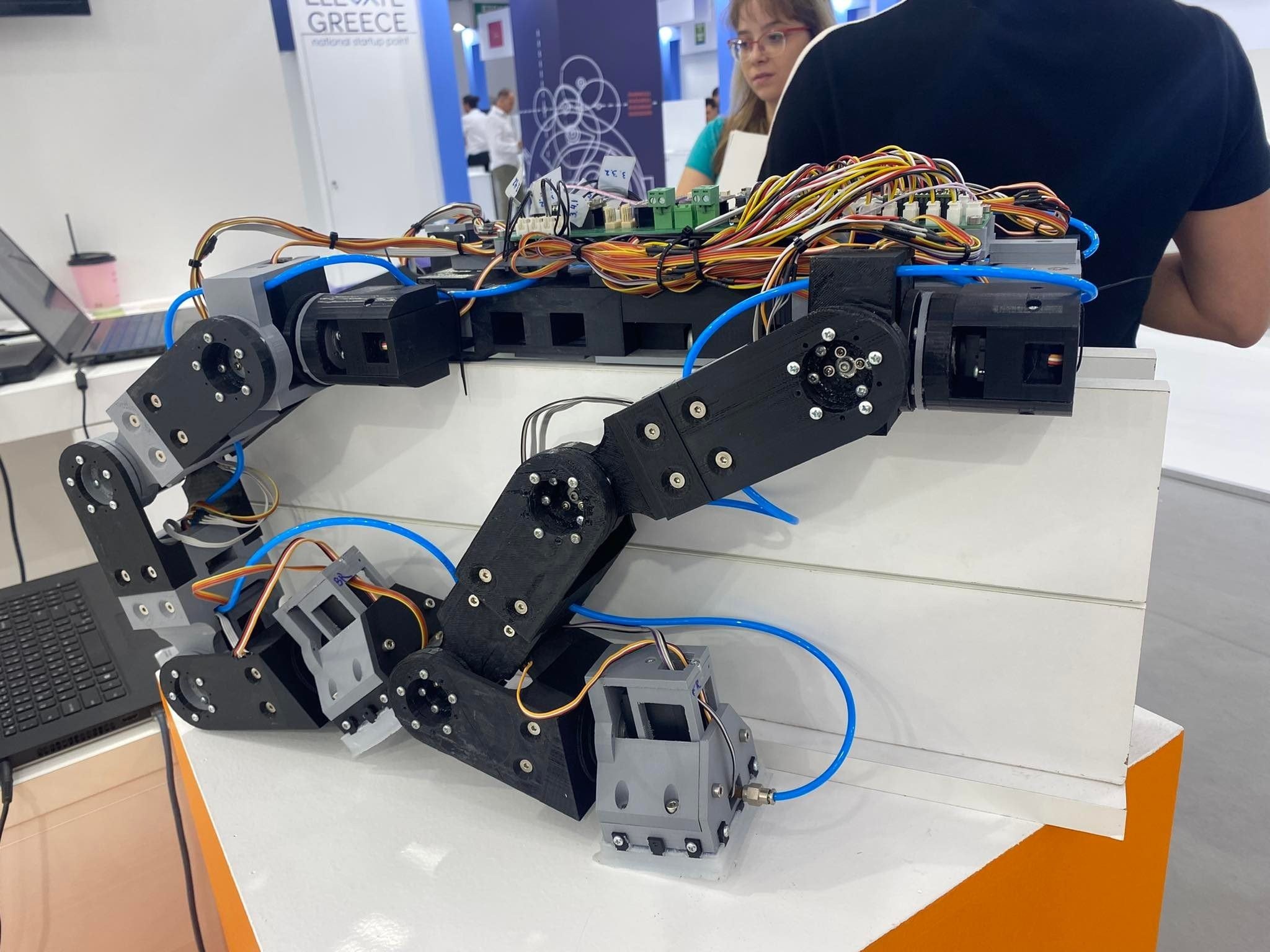
Το ρομποτικό αιλουροειδές που ακούει στο όνομα Ε-Cattie είναι εμπνευσμένο από το μυοσκελετικό σύστημα της γάτας ενώ σε κάθε πόδι έχει πολλές αρθρώσεις για μεγαλύτερη ευελιξία. Λόγω της σιλικόνης και των εσωτερικών δομών της… πατούσας της μπορεί να αναρριχάται και να στερεώνεται ακόμα και εντελώς ανάποδα σε κάθε επιφάνεια, ανεξάρτητα από την κλίση της.

«Η Ε-Cattie δεν στοχεύει στην ταχύτητα αλλά στην περιήγησή της σε οποιαδήποτε επιφάνεια ανεξάρτητα από την τραχύτητα και την κλίση της. Μπορεί να αναρριχάται και να στέκεται ακόμα και εντελώς ανάποδα με δικής μας κατασκευής βεντούζες.
Για την κατασκευή της έχουμε χρησιμοποιήσει πληθώρα υλικών με διαφορετικές ιδιότητες καθώς και εσωτερικές δομές μέσα στις βεντούζες από σιλικόνη. Έτσι φτιάχνουμε μία βεντούζα που μπορεί να πιάσει σε οποιαδήποτε επιφάνεια αρκεί να μην υπάρχει ρωγμή. Εάν έχουμε ένα τοίχο χωρίς ρωγμή η Ε-Cattie μπορεί να περιηγηθεί επάνω του», επισημαίνει ο Εμμανουήλ Παπαδάκης, Μηχανολόγος Μηχανικός και Υποψ. Διδάκτωρ του Εργαστηρίου.
Ο λόγος που τα τελευταία χρόνια βλέπουμε τα ρομποτικά τετράποδα να μπαίνουν δυναμικά στις βιομηχανίες δεν είναι άλλος από το πόσο εύκολα μπορούν να περιηγηθούν σε ένα εργοστάσιο και να ενσωματώσουν πάνω τους αισθητήρες και κάμερες για να πραγματοποιούν ελέγχους στις εγκαταστάσεις.
Για παράδειγμα εάν στο εργοστάσιο υπάρχει κάποια εξωτερική σωλήνα η οποία έχει διαρροή αερίου, η Ε-Cattie μπορεί να πλησιάσει και με έναν ειδικό αισθητήρα να εξακριβώσει ότι υπάρχει διαρροή αλλά και να "κλείσει" προσωρινά την ρωγμή εάν είναι μικρή.
«Η διαφορά αυτού του συστήματος από τα συμβατικά τετράποδα είναι ότι σε σχέση με αυτά – τα οποία θα πραγματοποιήσουν το έλεγχο από το πάτωμα με τη κάμερά τους - η Ε-Cattie μπορεί να ανέβει στον τοίχο, να περπατήσει στο ταβάνι και να σταθεί παράλληλα με τη σωλήνα για να εντοπίσουμε ακριβώς το σημείο της διαρροής η οποία αν μάλιστα είναι μικρή θα μπορούμε να ψεκάσουμε με ένα κολλώδες υλικό για να κλείσει προσωρινά η τρύπα και ο τεχνικός να πάει να κάνει μετά την επισκευή με ασφάλεια», αναφέρει ο κ. Παπαδάκης.
Βέβαια, η χρήση ενός τέτοιου συστήματος δεν περιορίζεται μόνο στα παραπάνω με τον κ. Παπαδάκη να λέει πως το πιο ακραίο σενάριο που έχουν σκεφτεί για την Ε-Cattie είναι η περιήγηςή της μέσα σε σπηλιές οι οποίες μπορεί να μην έχουν εξερευνηθεί και ποτέ από τον άνθρωπο ενώ λόγω του μεγέθους της και της ευελιξίας της μπορεί να περνά κάτω από επιφάνειες με πολύ χαμηλό ύψος. Επομένως θα μπορούσε να χρησιμοποιηθεί ακόμα και για τον εντοπισμό εγκλωβισμένων ανθρώπων σε συντρίμμια κλπ.
«Έχουμε ήδη κάνει κάποια πειράματα σε βραχώδεις επιφάνειες και θέλουμε να το εξελίξουμε ακόμα περισσότερο ώστε να η βάλουμε και σε πραγματική σπηλιά», καταλήγει ο κ. Παπαδάκης.